目前业界主流基本都是在x86架构上使用Docker,除了因为Intel在服务器领域的绝对领导地位之外,x86 CPU的确在性能上有着卓越的表现。
但是近些年来,随着云计算的迅猛发展,引来了数据中心的大规模建设,慢慢地大家对数据中心PUE尤其是CPU功耗有了更高的要求。
ARM CPU虽然性能不如x86,但是在功耗上绝对有着无法比拟的优势,同时我们知道并不是所有的服务都有高性能的CPU需要。
很多厂商在都对ARM服务器投入了研发资源,但是效果上目前来看并不是太好,ARM处理器在服务器领域并没有如在移动端那样被快速接受,主要是因为市场接受度及服务器市场的性能要求所致。

这是AMD之前推出的 ARM 服务器,但是并不是很成功。
但是在物联网(IOT)领域,ARM处理器却是霸主级的地位,毕竟在这个领域功耗胜过一切。
那么我们可以想象,未来会占大市场的IOT设备中,会出现各种尺寸各种架构,内置操作系统也不统一,没有通用程序打包标准,几乎每种设备程序的开发框架均不同,IOT设备中程序部署升级回滚等操作不够灵活,等等这样那样的问题。
而这些问题,我们可以借鉴X86时代的经验,用Docker容器来解决它们!
Docker能降低IOT应用管理的负载度,但是在物理设备和Docker之间,我们还需要一个轻量级的操作系统。这个OS需要是完全可以定制的,可以针对不同设备需求,裁剪或增加对应的程序模块,更小体积更少进程意味着更低的功耗。
根据以上判断和需求,我经过了一番探索,最终选择了RancherOS。
它本身的特性是:
1. 真正容器化的Linux操作系统极致精简,所有服务(包括系统服务)均运行在容器中,可以以容器方式对其进行任意定制
2. 内置了Docker Engine,无需在安装系统后再进行Docker安装
3. 完全开源 https://github.com/rancher/os ,我们可以进行各种深度定制。
4. 最最重要的,支持ARM
在RancherOS的整体架构中,最底层毋庸置疑是Linux kernel,系统启动后的PID 1用system-docker代替,由它来把udev、dhcp、console等系统服务启动,同时会启动user-docker,用户运行的应用程序均跑在user-docker下。

我们以树莓派为例,将RancherOS部署在其之上。这里需要提示的是,RancherOS每个版本release之时,都会放出树莓派的支持版本,比如本次分享使用的v0.7.0版本 https://github.com/rancher/os/releases/download/v0.7.0/rancheros-raspberry-pi.zip 。
通过dd命令将RancherOS写到树莓派的SD卡上,通电点亮树莓派。

这里使用的是 Pi-3B
查看PID 1是system-docker:
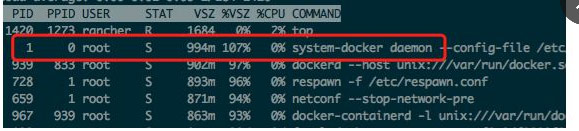
通过system-docker ps 查看启动的系统服务:

正常来说,我们都得设置一下docker registry mirror,这样方便pull镜像。RancherOS的配置,都是通过ros config命令来配置,比如设置user-docker的mirror:
$ sudo ros config set rancher.docker.extra_args [--registry-mirror,https://xxxxxxx] $ sudo system-docker restart docker # 重启user-docker
最终,可以看到:

RancherOS有一个我认为比较好的特性,就是支持很方便的对Docker Engine版本进行切换。
目前Docker迭代的速度并不慢,实际上很多程序不一定会兼容比较新的Engine,Docker Engine版本的管理变得越来越重要。
尤其是在测试环境中,我们有时确实需要变换Docker Engine版本,来构建测试场景:
$ sudo ros engine list #查看当前版本支持的engine有哪些 disabled docker-1.10.3 disabled docker-1.11.2 current docker-1.12.1 $ sudo ros engine switch docker-1.11.2 #切换docker-1.11版本
此外,如果对docker engine有更特殊的需求,还可以定制自己的版本,然后让system-docker来加载它。
只需将编译好的docker engine放到scrach镜像中即可:
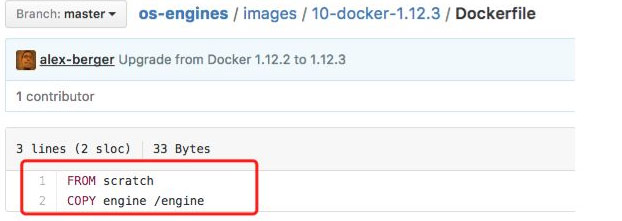
这部分可以参考:https://github.com/rancher/os-engines
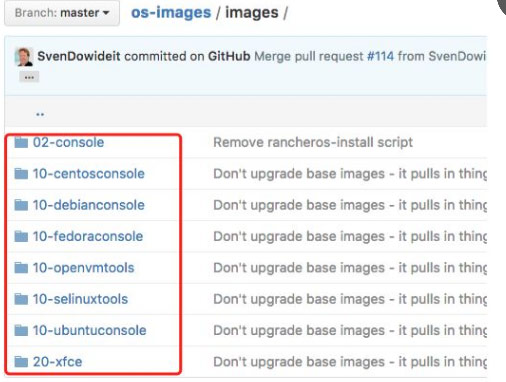
另外,如果习惯了使用相应Linux发行版的命令行,那么也可以加载对应的console镜像(当然如果考虑精简系统也可不必加载):
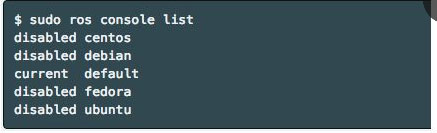
此部分需要进行深度定制,可以参考:https://github.com/rancher/os-images
RancherOS更多酷炫的功能,可以访问官方的文档:http://docs.rancher.com/os
RancherOS介绍完毕后,我们可以在单机树莓派上做容器管理了,喜欢命令行的当然最好,喜欢UI管理的,推荐两款可以在树莓派上运行的管理程序。
第一个介绍的是 portainer https://github.com/portainer/portainer
其有专门的arm镜像 portainer/portainer:arm ,运行后
$ docker run --restart=always -d -p 9000:9000 --privileged -v /var/run/docker.sock:/var/run/docker.sock portainer/portainer:arm

第二个是 更加简约的 ui-for-docker https://github.com/kevana/ui-for-docker
运行:
$ docker run --restart=always -d -p 9000:9000 -v /var/run/docker.sock:/var/run/docker.sock hypriot/rpi-dockerui
单机树莓派之后,我们就要考虑如何将多个树莓派组成Docker集群。
一提到Docker集群,我们就会考虑需要编排引擎的支持,无非就是主流的Mesos、Kubernetes、Swarm,还有非主流的Cattle、Nomad之流。
那么在IOT场景下,我们最需要考虑的就是精简,所以我选择了新版的Swarm。
将RancherOS的Engine切换到1.12.3,然后构建Swarm集群。
简单得执行swarm init和join后,我们就得到了一个树莓派Docker集群。

然后我们可以快速执行一个小demo:
swarmkit demo $ docker service create --replicas 1 -p 80 --name app armhf/httpd $ docker service scale app=2 $ docker service ps app

更多ARM相关的Docker镜像,可以到这两个地方查找:
https://hub.docker.com/r/armhf
https://hub.docker.com/u/aarch64
RancherOS设计之初是为了构建一个运行Rancher的轻量级操作系统,那么Rancher本身在ARM的支持上也在不断推进中,相应的PR也有提交:https://github.com/rancher/rancher/pull/4704 。
不过目前来看,对rancher-server的ARM化还是比较麻烦,对agent的节点支持ARM相对简单一些,也就是说rancher-server仍然运行在x86架构上,而agent节点可以支持ARM和x86。
Kubernetes的ARM支持在社区中也有很多人在做,比如:https://github.com/luxas/kubernetes-on-arm ,来自社区的分享:

秀一下,我的“家庭树莓派数据中心”:

最后,我要特别感谢RancherOS的开发者们,他们帮助我解决了很多问题;
另外还要特别感谢MBH树莓派社区的伙伴,提供了硬件设备,支持我的技术探索,并提供了很多帮助。
来源:http://niusmallnan.com/2016/11/07/docker-on-rpi/

评论前必须登录!
注册